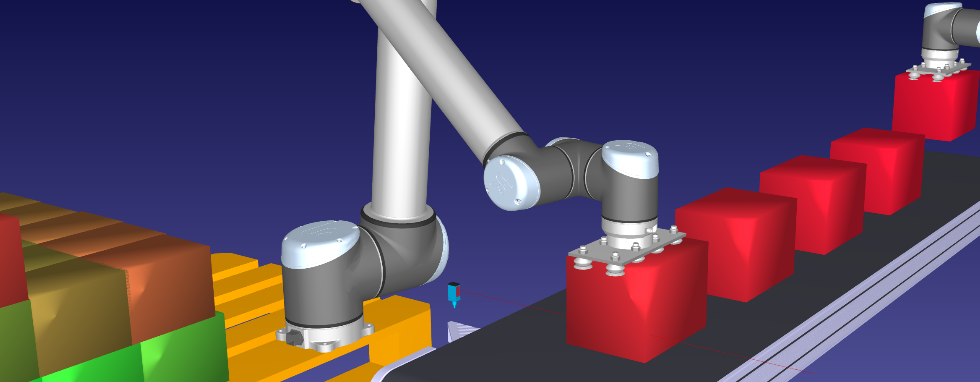
RoboDK通知/通用的机器人 利用RoboDK进行输送机仿真 2015年11月29日2017.9.17 - 通过RoboDK - 4评论。 分享 推特 分享 了解如何在20分钟内从头开始构建2个通用机器人和传送带的模拟: 在Facebook上分享 在Twitter上分享 在Linkedin上分享
你好, 我是机器人模拟的新手。 我想给RoboDK增加一个工作站,然后在上面安装两个Abb机器人。我已经保存了车站(3D模型为Obj)。但我不确定是否要把机器人安装在空间站上。 由于某些原因,我无法安装/合并两个坐标系原点。你们有没有视频/文献,解释如何建立一个电台? 请提供你的反馈/怎么做? 问候Aj 回复
您可以通过按住ALT键并移动参考系来移动机器人。您也可以双击参考系并输入坐标。以下视频将向您概述基本的离线编程功能:raybet雷竞app下载https://www.youtube.com/watch?list=PLjiA6TvRACQc5E_3c5f3TFXEa56XNR1-m&v=XQs8-QnLy6c 回复
嗨gianni,是的,这是可能的。你应该使用“设定速度”指令。更多信息请点击这里://www.jasonament.com/doc/en/Robot-Programs.html#InsSpeedRoboDK使用恒定的加速度,直到达到所需的速度。这是UR机器人使用的相同行为,RoboDK预测的周期时间应该与机器人速度匹配(假设你没有超过最大速度或你没有使用任何舍入/混合)。艾伯特 回复

你好,
我是机器人模拟的新手。
我想给RoboDK增加一个工作站,然后在上面安装两个Abb机器人。
我已经保存了车站(3D模型为Obj)。但我不确定是否要把机器人安装在空间站上。
由于某些原因,我无法安装/合并两个坐标系原点。
你们有没有视频/文献,解释如何建立一个电台?
请提供你的反馈/怎么做?
问候
Aj
您可以通过按住ALT键并移动参考系来移动机器人。您也可以双击参考系并输入坐标。
以下视频将向您概述基本的离线编程功能:raybet雷竞app下载
https://www.youtube.com/watch?list=PLjiA6TvRACQc5E_3c5f3TFXEa56XNR1-m&v=XQs8-QnLy6c
在RoboDK中,可以选择在联合移动中使用线性约束。(这意味着TCP的最大速度和加速度是受限的)。这有意义吗?这个选项适用于实际情况吗?为什么?(我指的是UR10机器人)
提前谢谢你。
嗨gianni,
是的,这是可能的。你应该使用“设定速度”指令。更多信息请点击这里:
//www.jasonament.com/doc/en/Robot-Programs.html#InsSpeed
RoboDK使用恒定的加速度,直到达到所需的速度。这是UR机器人使用的相同行为,RoboDK预测的周期时间应该与机器人速度匹配(假设你没有超过最大速度或你没有使用任何舍入/混合)。
艾伯特