What is RoboDK?
RoboDK is a powerful and cost-effective simulator for industrial robots and robot programming.
RoboDK simulation software allows you to get the most out of your robot.
What is best about RoboDK?
没有编程skills are required with RoboDK's intuitive interface
You can easily program any robot offline with just a few clicks
RoboDK has an extensive library with over 800 robot arms
RoboDK key benefits
The advantage of using RoboDK's simulation and offline programming tools is that it allows you to program robots outside the production environment.
With RoboDK you can program robots directly from your computer and eliminate production downtime caused by shop floor programming.
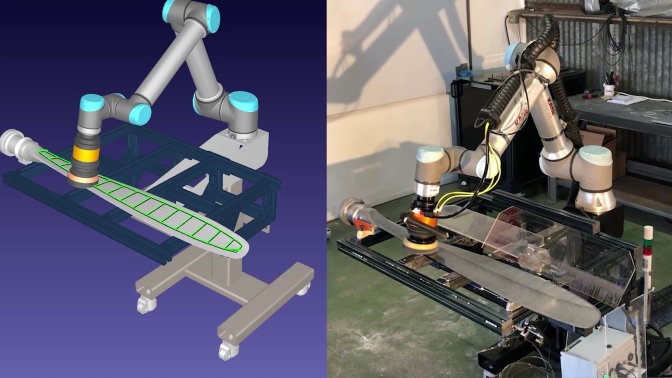
Robot Machining
Use your robot arm like a 5-axis milling machine (CNC) or a 3D printer. Simulate and convert NC programs to robot programs (G-code or APT-CLS files). RoboDK will automatically optimize the robot path, avoiding singularities, axis limits and collisions.
Send usa sample project and we will help you set it up in RoboDK!

Offline Programming Software
Simulation and Offline Programming of industrial robots has never been easier. Create your virtual environment to simulate your application in a matter of minutes.
Easily generate robot programs offline for any robot controller. You don't need to learn vendor-specific programming anymore.

Robot Library
Access an extensive library of industrial robot arms, external axes and tools from over 40 different robot manufacturers. Easily use any robot for any application, such as machining, welding, cutting, painting, inspection, deburring, and more!
Don't see your robot?Let us knowand we'll include it!

Robot Accuracy
Your robot arm is not accurate enough?
Calibrate your robot armto improve accuracy and production results. RunISO9283 robot performance tests.

Export Programs to your Robot
RoboDK Post Processors support many robot controllers, including:
ABB RAPID (mod/prg)
发那科LS (LS / TP)
KUKA KRC/IIWA (SRC/java)
Motoman Inform (JBI)
Universal Robots (URP/script)
…和更多!
Proven Software Technology
From the world's largest companies
to startups.
Over 50,000 users in 50 countries
trust RoboDK Software.

RoboDK Applications

Welding

Machining

Dispensing

Inspection

Painting
