
编程末端执行器是很棘手的。每个品牌的做法都不一样!如果每个工具都使用相同的方法,那不是很棒吗?以下是如何做到这一点!
有这么多方法来控制末端执行器!!
一些末端执行器使用基本的数字I/O(开/关,开/关等)。其他使用模拟输出(例如0V到5V)。其他使用串行通信(如modbus, CAN总线,i2c)。其他人使用USB。其他人使用以太网与TCP/IP…
为什么我们不能用同样的方法来编程所有的末端执行器!?
在本文中,我们将解释如何做到这一点。
末端执行器的问题
在RoboDK,我们希望让您尽可能轻松地编程任何机器人,而不必为每个新品牌掌握不同的编程方法。
我们的ios版雷竞技官网入口包含数百个不同的机器人。您可以使用相同的方法对它们进行编程,而不必学习特定于制造商的编程语言—使用图形化编程或使用你最喜欢的编程语言,这取决于你的喜好。因此,我们让你比以往任何时候都更容易编程任何机器人品牌,没有额外的学习曲线。
因此,您将需要进行一些编程,以便将终端执行器与脱机编程一起使用。raybet雷竞app下载但是,我们已经尝试将编程减少到最低限度。
末端执行器不是那么简单。即使在同一品牌的末端执行器中,不同的型号也需要不同的编程方法。有些只有一组简单的命令,有些则非常复杂。
如何在RoboDK中编程任何末端执行器
我假设你已经熟悉了基本的RoboDK编程。如果没有,那么阅读入门指南.
步骤0:加载你的末端执行器模型
在你开始编程你的末端执行器之前,你需要一个机器人模型加载到RoboDK中,附加你的末端执行器模型。如果你还没有末端执行器,这里有三种方法来添加一个到你的模拟:
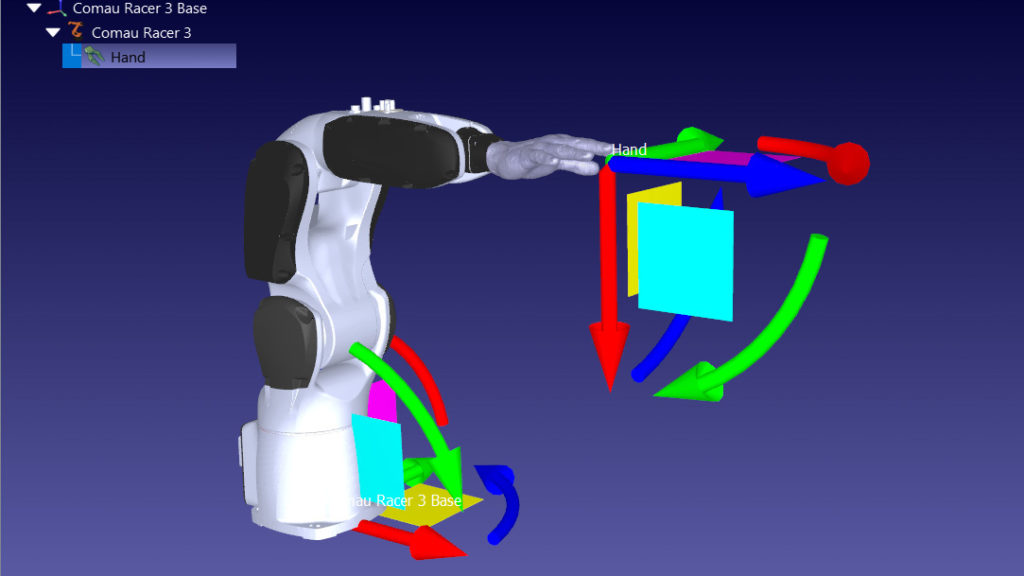
你可以使用任何末端执行器。手模柚木.
- 获取一个通用工具ios版雷竞技官网入口(在“类型”菜单中选择“工具”)并将其添加到RoboDK。
- 在“程序”菜单中选择“添加空工具”,创建一个空工具。这将创建一个“隐形”工具,在机械臂的末端有一个参考框架。
- 使用3D CAD文件加载任何自定义末端执行器。有关如何做到这一点的说明,请阅读5分钟指南使用任何终端执行器与RoboDK.
- 确保正确定义了工具中心点(TCP):用RoboDK定义TCP。
第一步:学习如何控制末端执行器
阅读随终端执行器而来的手册,了解如何控制它。正如我所提到的,这在不同的模型之间有很大的不同。
为所需的功能选择最简单的控件选项。
例如,如果末端执行器可以通过数字I/O操作,通常最容易实现这一点的方法是使用机器人控制器上的引脚。如果它需要通信协议(如以太网,modbus),你将不得不深入研究。
一些终端执行器同时支持数字I/O控制(用于基本操作)和通信协议(用于更高级的功能)。如果您不需要高级功能,则不必使用完整的控件。
至少,你需要学习如何激活/禁用末端执行器。例如:
- 关闭/打开夹
- 启动/停止喷漆或焊枪
- 启动/停止加工主轴
- 挤出/停止3D打印挤出机
第二步:做一个基本测试
在你开始用RoboDK编程末端执行器之前,测试一下你是否能控制它是一个好主意。测试这一点的一个好方法是在机器人的教学吊坠中编程一个基本功能。
例如,如果末端执行器使用数字I/O,您将必须使用以下步骤通过teach pendant操作它:
- 将末端执行器电缆插入机器人控制器上正确的引脚。
- 使用teach pendant接口创建一个新程序。
- 使用对应于所使用引脚的数字I/O寄存器激活末端执行器。
当您可以通过teach吊坠激活/禁用末端执行器时,您就可以使用RoboDK控制它了。如果你正在挣扎,试着在我们的网站上提问机器人论坛(我们不是所有末端执行器的专家,但有人应该能够指出你在正确的方向)。
步骤3:创建结束执行器函数
打开RoboDK并创建一些函数来使用你的末端执行器。
这些功能只会被机器人控制器使用,不会被RoboDK自己使用。因此,他们需要进入机器人的“后处理器”。阅读下面的文章,了解更多关于这些在RoboDK中的工作原理:机器人后处理:你需要知道的一切
您将需要更新后处理程序以包括末端执行器函数。后期处理器可以在“程序”菜单中找到,然后在“添加/编辑后期处理器”中找到。你可能想要创建一个新的后处理器,为你的机器人复制一个现有的后处理器,并添加你的新功能。这确保了原始后处理器不受额外代码的影响。
结束执行器函数应该进入HEADER_PROG变量。一个很好的例子可以在“Universal Robots RobotiQ”后处理器中看到,它包括打开和关闭RobotiQ夹持器的函数。看看它自己是怎么做的。
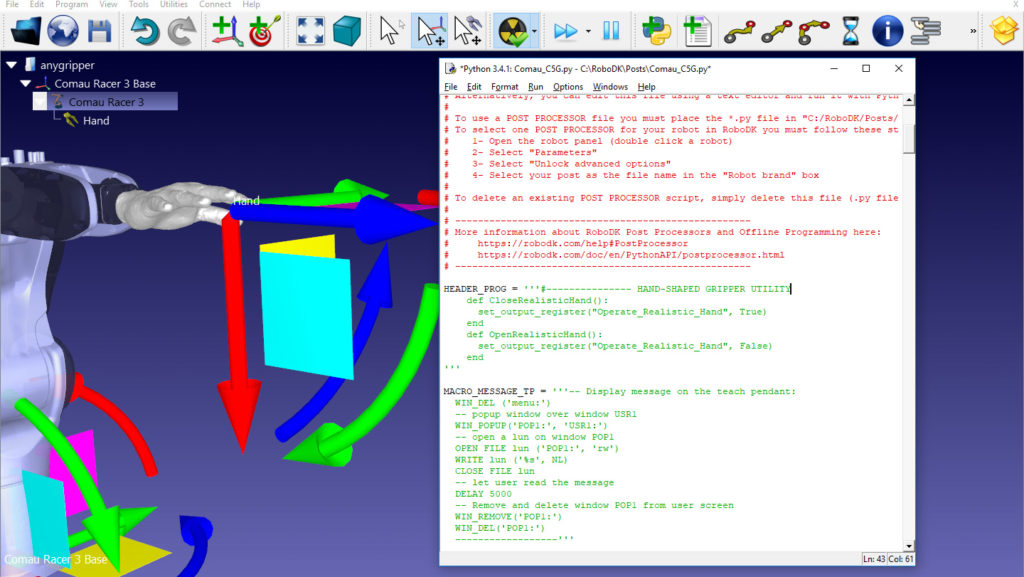
你需要包含至少两个函数——一个激活末端执行器,另一个去激活它。您可能还希望包含其他函数以访问末端执行器的更高级功能。
步骤4:在机器人程序中调用函数
接下来,您需要在RoboDK的机器人程序中调用刚才创建的函数。
你可以用RoboDK的两种方式编程你的机器人:使用图形编程或使用你最喜欢的编程语言。无论哪种方式,要激活/禁用你的末端执行器,你只需要在机器人程序中任何你想要它们被触发的地方插入你的新函数调用。
在图形化编程中,通过使用“程序调用指令”(可以在“程序”菜单中找到)调用自定义函数。在出现的框中,只需输入机器人控制器应该调用的函数(即包括任何必要的括号和/或参数)。当机器人程序生成时,这一行将被添加到程序中。
步骤5:生成机器人程序
最后,您只需要生成机器人程序就完成了!
要做到这一点,首先要确保你使用了正确的后置处理器,在程序树中右键单击机器人并选择“选择后置处理器”。
然后,右键单击程序树中的机器人程序并选择“生成机器人程序”。这将创建一个程序文件,你可以直接在你的机器人控制器上运行。
简单!
你在编写末端执行器时遇到过什么挑战?请在下面的评论中告诉我们,或者加入讨论LinkedIn,推特,Facebook,Instagram或在RoboDK论坛.


